
Для чего нужен ОрбиКрафт
Подсистемы конструктора
Инструкции по работе с ОрбиКрафт
Уроки
Лабораторная оснастка
Знакомство с Arduino
Полезная нагрузка на базе Arduino
Обратная связь
Новости
Для чего нужен ОрбиКрафт
Подсистемы конструктора
Инструкции по работе с ОрбиКрафт
Уроки
Лабораторная оснастка
Знакомство с Arduino
Полезная нагрузка на базе Arduino
Обратная связь
Новости
УКВ-приемник телеметрии
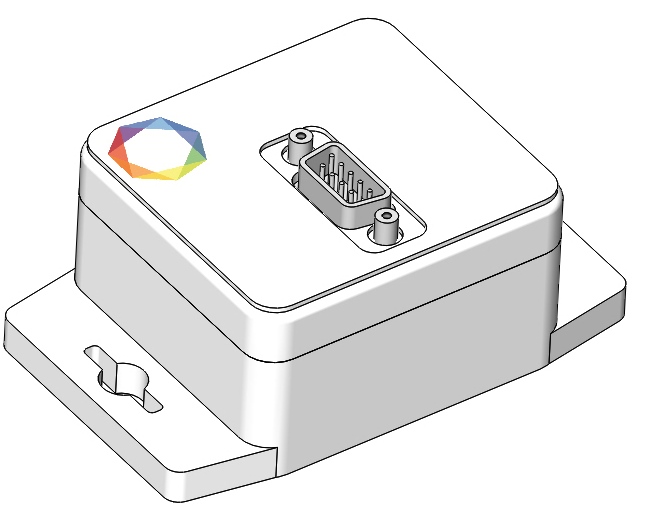
УКВ-приемник из состава конструктора имитирует работу радиоприемной части наземной станции приема телеметрической информации по низкоскоростному каналу. Во время экспериментов со «спутником» аналогичные приемники будут смонтированы непосредственно на поверхности «Земли» - глобусе. Однако для предварительной отработки работы со спутником в комплекте также поставляется данный УКВ-приемник телеметрии.
Сам приемник работает совместно с ПО ЦУП. При передаче данных телеметрии бортовым радиоканалом и подключенном УКВ-приемнике в наземной сети, эти данные будут автоматически приниматься наземным радиоканалом и отображаться в текстовом поле в левой части пользовательского интерфейса ПО ЦУП.
Код проверки системы телеметрии на языке C
#include "libschsat.h" /* ** Lab 8: UHF transceiver demo. */ void control(void) { const uint16_t tx_num = 2; const uint16_t rx_num = 1; const char hello[] = "hello, world!"; printf("Enable transceiver #%d\n", tx_num); transceiver_turn_on(tx_num); Sleep(1); bus_setup(); printf("Send data from #%d to #%d\n", tx_num, rx_num); if (LSS_OK != transceiver_send(tx_num, rx_num, (uint8_t *) hello, sizeof(hello))) puts("Fail!"); printf("Disable transceiver #%d\n", tx_num); transceiver_turn_off(tx_num); return; }
